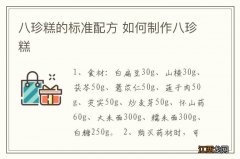
输入注释信息“RobotLink_Test” , 同步输出下设置为信号“DO[1
” 。 再次按“F3 详细” , 进入详细信息界面 , 其中需要设置的内容如下表所示:
返回MULTI ARM设置界面 , 选择“3 状态输出信号” →“F3 详细” , 进入状态信号详细信息界面 , 设置内容如下所示:
1 主导装置状态信号:DO[2
2 从动装置状态信号:DO[0
再次返回MULTI ARM设置界面 , 选择“4 校准(Calib)资料” →“F3 详细” →“F3 详细” , 在校准(Calibration)资料详细信息界面中 , 设置内容如下所示:
C:1 , GP:1(X , Y , Z , W , P , R)=(0 , 0 , 0 , 0 , 0 , 0)
设置完成后按“F4 完成” , 然后手动机器人进行冷启动 , 启动完成后设定值生效 。
ROBOGUIDE软件中多机器人同步运动虚拟仿真时 , 一般情况下都是以主机器人的位置作为基准位置 , 也就是零点位置 , 因此在校准(Calibration)资料界面输入校准标定数据时 , 主机器人的校准坐标值要全部输入“0” 。
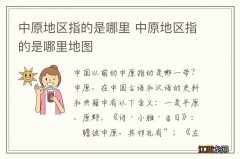
设置从机器人链接设置其余3台从机器人与主机器人的链接 , 前两步3台从机器人设定参数值相同 。 在虚拟示教器中按“MENU”键 , 依次选择“设置”→“Multi-Arm”→“2 主导装置一览表”→“F3 详细” , 进入主导装置一览表详细信息界面 , 设置内容如下表所示:
返回MULTI ARM设置界面 , 选择“3 状态输出信号” →“F3 详细” , 进入状态信号详细信息界面 , 设置内容如下所示:
1 主导装置状态信号:DO[0
2 从动装置状态信号:DO[2
再次返回MULTI ARM设置界面 , 选择“4 校准(Calib)资料” →“F3 详细” →“F3 详细” , 进入校准(Calibration)资料详细信息界面 。 这一步骤中 , 3台从机器人需要设置不同的参数值 。
从机器人的校准标定坐标值是从机器人的位置坐标相对于主机器人的位置坐标的偏移量 , 也就是主机器人位置坐标值与从机器人位置坐标值的差值 。 经过计算后得到3台从机器人的校准标定坐标值 , 如下所示:
C:2 , GP:1(X , Y , Z , W , P , R)=(-4000 , -145 , 0 , 0 , 0 , 180)
C:3 , GP:1(X , Y , Z , W , P , R)=(-4000 , -3145 , 0 , 0 , 0 , 180)
C:4 , GP:1(X , Y , Z , W , P , R)=(0 , -3000 , 0 , 0 , 0 , 0)
设置完成后按“F4 完成” , 然后手动机器人进行冷启动 , 启动完成后设定值生效 。
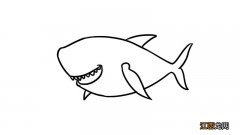
设定工作站I/O信号连接主从机器人的通信与链接设置完成后 , 还要在ROBOGUIDE软件中设置I/O信号连接 , 这样在同步运动时才能实现主从机器人之间的信号交互 。
软件“Cell”菜单下选择“I/O Interconnections” , 在弹出的I/O InterConnects对话框中 , 按照下图所示依次添加主机器人与从机器人之间的I/O信号连接 。
手动确认主从机器人之间的通信和同步运动主从机器人全部配置完成后就可以手动测试机器人之间的通信与同步运动了 。 打开主机器人的虚拟示教器 , 然后按“MENU”键 , 依次选择“手动操作”→“机器人同步动作” , 进入机器人人工同步动作界面 , 此时界面中现在的同步状态显示为“单独” , 也就表示主从机器人处于独立运动状态 , 可以使用各自的虚拟示教器单独手动运行机器人 。
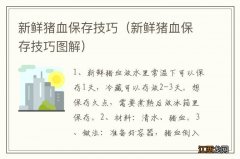
按“F4 主导装置” , 界面中的现在的同步状态切换为“主导装置(人工)” , 表示主从机器人已建立通信链接 , 并且机器人手动同步运动已处于激活状态 。
此时 , 在主机器人的虚拟示教器中手动运行主机器人 , 软件工作区中就可以看到从机器人会跟随主机器人同步运动 , 可以直线运动也可以单轴运动 , 并且在直线运动时从机器人TCP相对位置始终与主机器人TCP相对位置保持不变 。
相关经验推荐








- 软件|几个有意思又高利润超低成本的项目
- 软件|著名媒体对2款顶级旗舰真无线耳机进行了比较,并得出了结论
- 软件|6款电脑必备的小众软件,他们在认真做事
- 软件|AMD考虑学习Intel和NVIDIA:CPU、显卡软件可能收费
- 软件|小米手机这个功能一定要打开,不然会自动偷偷安装软件,越用越卡
- 软件测试|对于软件测试行业的·缺点~
- 软件|【Materials Studio】软件界面入门第3期
- 软件|别再说联发科拍照不行了,这款旗舰拍照性能直接拉满
- 软件|不用看美企的脸色了?中科院传出消息,外媒:开始弯道超车了!
- 软件|如何选择适合自己的知识管理系统