irobot|扫地机+擦地机能实现1+1>2?是什么让iRobot一直坚持扫拖分离技术( 五 )
▼使用过扫拖一体机器人的小伙伴一定都知道 , 扫拖地机无法处理大面积的液体 , 这是由于主流的扫拖机器人采用的都是先吸后拖的方式 , 在清扫过程中如果不慎吸入大量的液体 , 很有可能就会损坏电机 , 直接报废 , 所以扫拖机器人只能清理地面的灰尘以及少量污渍 。
而对于Braava jet m6来说这些其实都不是事 , 由于不用负责扫 , Braava jet m6的底部只有拖布没有吸尘口 , 厚实的拖布能够直接带走地上的液体 , 不用再事先动手用拖把先拖一下 。
▼设想一下 , 如果用扫拖一体机器人来拖这么黏腻的酱汁会出现什么后果 , 大概是边刷 , 滚刷上都涂满了酱汁 , 甚至尘盒里都满是黏糊糊的酱汁 , 清洗起来简直就是恶梦 。 而专司拖地的Braava jet m6则完全不需要顾及这点 , 对付各种污渍 , 干的 , 湿的 , 它都能胜任 , 而且由于它的底盘上仅有一块拖布 后期打理起来也要更加方便省事 。
▼能拖还不够 , 还要拖得干净 , 来看看Braava jet m6是怎么拖地的 。 首先他会先前进拖一段 , 然后再后退一段距离往地上喷水 , 之后再继续前进 , 相当于一块地面拖了三遍 , 模拟人手的拖地方式带来了98%的擦净率和99.9%的除菌率 , 跟m6这么一对比我顿时觉得其他扫拖机器人挂着抹布游走全屋的方式充其量只能叫做擦 , 并不能叫拖 。
▼清洁过程中 , 前方的喷水口会先向地板喷水 , 然后再往前拖 , 这样的拖地方式对于那种在地面上已经干了十几个小时以上的顽固污渍能够起到更好的清洁效果 。
【irobot|扫地机+擦地机能实现1+1>2?是什么让iRobot一直坚持扫拖分离技术】▼尽管在单条路径上花费了更多时间 , Braava jet m6依然会像扫地机器人那样以“弓”字型的走位进行地面清洁 , 清扫逻辑和Roomba i7+保持了一致 , 同样非常耐心细致 。
▼拖布前置还有一个明显的优势 , 由于拖布是紧贴着地面 , 所以一旦它遇到比它高出的物体就会立即掉头 , 这样就能避免拖地机器人带着湿漉漉的抹布强行驶向地毯或者地垫 , 这样的识别方式感觉比任何高精度的传感器都要来的有效 。
▼噪音也是我在体验过程中发现的一大亮点 , 由于不需要电动马达 , 也就没有了吸入时带来的噪音 。 m6在工作时的噪音仅50dB左右 , 即使是家中有人的情况下也不会影响到正常聊天 , 有时甚至能忽略它的存在 。
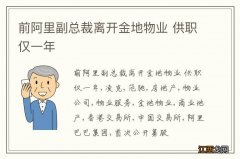
▼在后来针对边角的清扫中 , 我理解了正方形机身的意义 , 圆形的扫地机器人由于配备了一个细长的边刷 , 在清扫死角的时候边刷能够深入到角落 , 清理角落的灰尘 , 但拖地机器人由于没有配备边刷 , 因此就只能用矩形机身去贴合边角 , 实现无死角的清扫 。 在后来的清扫过程中也证明 , 正方形机身在清洁死角或者沿边清扫的时候确实能够带来更高的清洁效率 。
▼体验到这里 , 一直困扰在我心头的两个问题顿时迎刃而解 , 业精于专 , 术业有专攻 , 两台机器一扫一拖 , 各自负责各自的领域 , 清扫时发挥各自的强项和优势 , 才能将最终的清洁效果和用户体验发挥到最大 , 把单一功能做到极致 , 这就是iRobot想要向用户传达的产品理念 。
▼智能家电当道的今天 , 两台机器人也可以通过iRobot Home这个APP实现远程操控 , 整个APP的UI界面简洁明了 , 将Roomba和Braava分别配网之后就可以在APP端进行管理 。
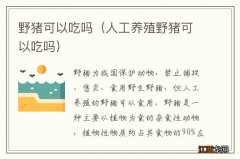
▼随着不断的深入清扫 , 手机中的虚拟地图也得以一点点清晰展现 , 在清扫一遍之后Roomba就准确的绘制出了我家的平面图 , 地图中不仅标注出了障碍物的位置 , 还用绿色的区域对此次清扫的面积进行了直观的反馈 。
相关经验推荐





- 扫地机器人|性能比原装强2倍,iPhone 13最佳辅助配件来袭,体积仅为饼干大小
- 扫地机器人|国产扫地机器人“一哥”:超越外资拿下43%市场,9个月吸金82亿
- 电池|我给扫地机器人找了个家,空间立体利用
- 扫地机器人|小米 12X 与摩托罗拉 edge S30 详细对比:优缺点一目了然
- 小米科技|小米真的改变了普通人的生活,扫地机器人解放了双手,相信一定会越来越好
- 扫地机器人|iPhone 14有望采用打孔屏:QLC闪存 最高2TB
- 扫地机器人|石头科技的戴森梦碎
- 扫地机器人|5部手机同时抽中2300元“优惠券” 扫地机器人大奖背后是何套路?
- 扫地机器人|云鲸新品套装降价900元,带有上下水装置,扫地机器人又进化了
- 扫地机器人|国产扫地机器人出圈,9个月吸金82亿,赶跑外资,跃居销量第一